CANbus TDM是为力科示波器提供的一种功能强大的触发、解码和测量/图示工具,将大大提高调试和验证CAN ECU或网络性能的能力。它把示波器的物理层分析功能与基于消息的触发、协议解码及CAN特定测量和图示结合在一起。...
”智能CANBus总线触发 其它“ 的搜索结果
CAN总线错误处理机制及Bus-off问题现象分析.pdf



http://blog.csdn.net/flydream0/article/details/8161418CAN总线在嵌入式Linux下驱动程序的实现http://www.21ic.com/app/embed/200911/49216.htmSocke Can设置波特率找到其中一个方法使用IP命令,BUSYBOX制作的IP...

Can BusOff笔记
标签: 笔记
此时BSM状态为CANSM_BSM_S_FULLCOM,子状态为FULLCOM_S_RESTART_CC,...(BusOff事件发生时间计时,由busoff发生后从0开始,在1ms函数CanSM_FullCom_S_Tx_Off中周期++,只有在BusOff事件刚发生或者cansm初始化时清0)
控制器局域网(Controller Area Network,简称CAN或者CAN bus) 是一种功能丰富的车用总线标准。被设计用于在不需要主机(Host)的情况下,允许网络上的单片机和仪器相互通信。 它基于信息传递协议,设计之初在车辆上...
本文简单介绍了在STM32F407上的CAN总线调试过程,解决了一个数据接收的问题,简单整理了一下调试的过程和思路。
BOSCH 发明的一种基于消息广播模式的串行通信总线,它起初用于实现汽车内ECU之间可靠的通信,后因其简单实用可靠等特点,而广泛应用于工业自动化、船舶、医疗等其它领域。相比于其它网络类型,如局域网(LAN, Local ...
CAN总线错误分析与解决背景写这篇文章是因为我看到网上介绍CAN总线错误处理的文章,清一色的都是生搬照抄教科书或是数据文档的内容,特别是国内很难找到一些有价值的内容,这让一些真正有需要的人很苦恼,包括我自己...

一般发生BUS-OFF的条件是CAN总线受周围环境干扰,导致CAN发送端发送到总线的数据被BUS总线判断为异常,但异常的次数超过255次,BUS总线自动设置为BUS-OFF状态,此时总线处于忙的状态,数据无法发送,也无法接收。...




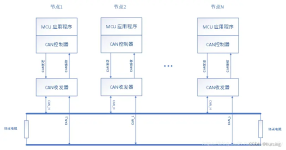
我们先看下什么是Canbus: 控制器局域网 (Controller Area Network,简称CAN或者CAN bus) 是一种车用总线标准。被设计用于在不需要主机(Host)的情况下,允许网络上的节点相互通信。采用广播机制,并利用标识符来...

后来CAN总线在汽车上使用越来越广泛。所谓多路传输,指在计算机局域网中,将多种信息混合或交叉通过一个通信信道传送的方式。一个具有多路传输功能的网络允许多个计算机同时对它进行访问。 CAN(多路传输技术)应用...
因此,本篇文章主要用于记录搭建CAN外设系统会出现的问题。由于ZYNQ系统包含PS和PL两个部分,PS部分往往问题较少,所以考虑先搭建PS系统的CAN外设系统。熟悉了基本流程和软件库函数使用后,再搭建PL的CAN外设应用。...
CAN总线的OFF中断是由CAN控制器自动检测到总线错误时触发的。当总线错误发生时,CAN控制器会自动进入OFF状态,并向MCU的CAN中断标志位写入OFF中断标志,通知MCU发生了总线错误。MCU可以通过读取CAN中断标志来检测...
一文理解CAN总线协议
概述CAN(Controller Area Network)总线协议是由BOSCH发明的一种基于消息广播模式的串行通信总线,它起初用于实现汽车内ECU之间可靠的通信,后因其简单实用可靠等特点,而广泛应用于工业自动化、船舶、医疗等其它领域...
只用到【只收】【只发】功能。
推荐文章
- c语言上机作业选择结构,《C语言实验指导》实验四 选择结构程序设计-程序员宅基地
- 李永乐线性代数2020年强化课手写笔记汇总_李永乐的手写讲义-程序员宅基地
- 电影拍摄胶片比例_用于创建自己的电影胶片的10个很酷的Photoshop教程-程序员宅基地
- 374.猜数字大小-程序员宅基地
- FLStudio21.2.2.3914中文破解版完整下载-程序员宅基地
- 【报告分享】2021颜值经济新消费报告-CBNDATA(附下载)_cbndata dtc市场-程序员宅基地
- ffmpeg(ignore)------显示相关-SDL及函数 1.2 2.0版本_sdl2含有sdl_overlay的版本-程序员宅基地
- 使用YYModel 字典转换模型_modelcustomtransformfromdictionary-程序员宅基地
- train-labels-idx1-ubyte(mnist数据集)二进制格式_train-labels-idx1-ubyte.gz: none-程序员宅基地
- NLP——如何批量加载数据_for is_end, d in self.sample(random)-程序员宅基地